




Контролер за посока на DC мотор – прецизно управление на движението без сложни схеми
Разполагате с линеен актуатор, реверсивен механизъм или DIY проект, който изисква прецизно управление на посоката? Без специализиран модул често се налага изграждането на сложни схеми с релета, транзистори и много кабели. Този DC моторен контролер решава всичко в един компактен модул: просто свързвате захранването, мотора и бутоните, и системата е готова за работа за минути.
Забележка: Моторът получава същото напрежение, което подавате към контролера. Напрежението не се регулира от самия модул.
Защо да изберете този модел? (Основни предимства):
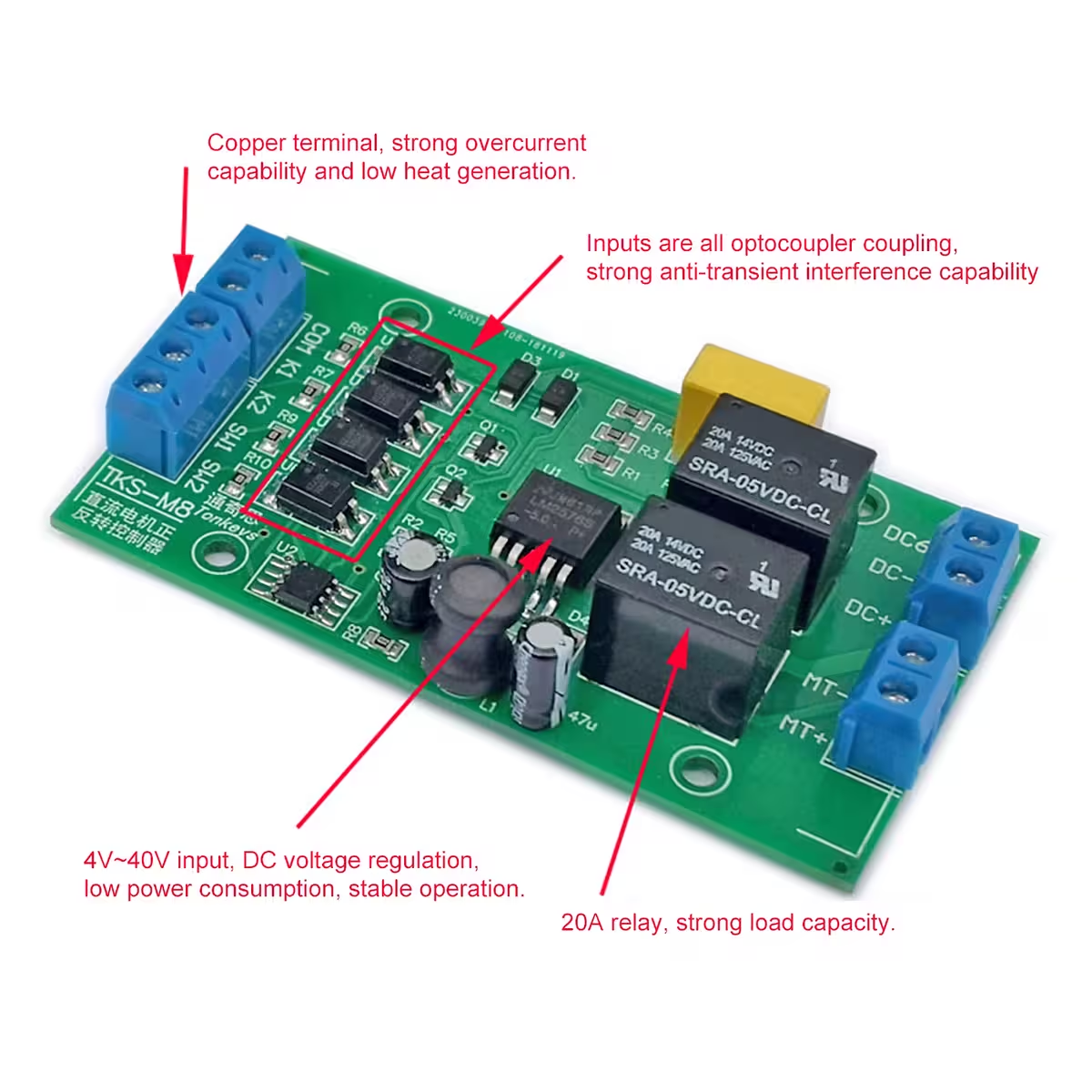
- Широк диапазон на напрежението: 4–40V DC — работи отлично с LiPo батерии, лабораторни захранвания или индустриални адаптери без нужда от модификации.
- Изходен ток до 20A — справя се с мотори с високи пускови токове, подходящ за товари до около 80W.
- Два избираеми режима: PO и P1 — превключвайте между автоматично задържане (старт с кратък импулс) и „jog“ режим (активен само докато държите бутона натиснат).
- Универсални active-low входове — директно свързване на обикновени бутони, механични NO крайни изключватели или 3-проводни NPN сензори, без нужда от допълнителни резистори.
- Вградени крайни изключватели SW1/SW2 — автоматично спиране в края на хода, което елиминира риска от механично блокиране или претоварване.
- Дълъг експлоатационен живот >150 000 цикъла — надеждност за приложения с ежедневна интензивна употреба.
- Ниска консумация: 0,6W в работен режим / 0,1W в режим на готовност — пести енергията на батерията, когато системата не се използва.
Детайли и производителност
Контролерът използва архитектура с active-low входове: входът се активира, когато напрежението падне под 2V. Това позволява директно свързване на стандартни бутони, NO (нормално отворени) крайни изключватели и NPN-NO 3-проводни сензори без междинни компоненти.
Времето за реакция е ≈20ms за командите K1/K2 и ≈50ms за крайните изключватели SW1/SW2 — достатъчно бързо за динамични приложения и същевременно стабилно, за да се избегнат фалшиви задействания.
При по-високи напрежения препоръчителният ток намалява: при 12V можете да използвате до 20A, докато при 24V е препоръчително ограничение до ~10A за безопасна работа в дългосрочен план. Винаги използвайте подходящо оразмерен предпазител и кабели, съобразени с товара.
| Параметър | Стойност / Детайл |
|---|---|
| Работно напрежение | DC 4–40V (препоръчително 6–36V) |
| Максимален изходен ток | до 20A (при 12V) |
| Препоръчителна мощност на мотора | до ~80W |
| Консумация (работен режим) | прибл. 0,6W |
| Консумация (standby) | прибл. 0,1W |
| Тип входен сигнал | Active-low (активен при напрежение < 2V) |
| Време за реакция K1/K2 | ≈ 20ms |
| Време за реакция SW1/SW2 | ≈ 50ms |
| Режими на работа | PO (автоматично задържане) / P1 (jog) |
| Експлоатационен живот | >150 000 цикъла |
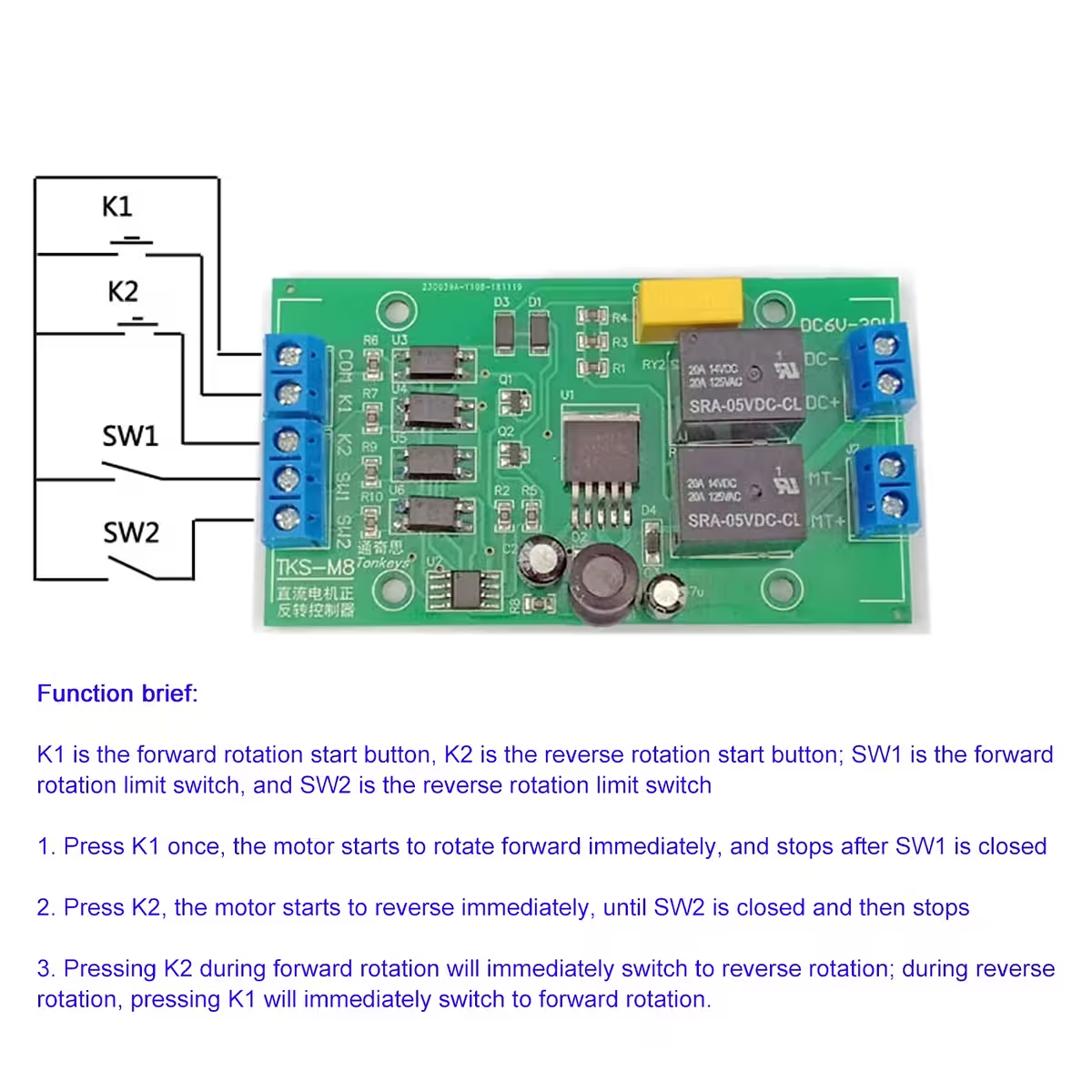
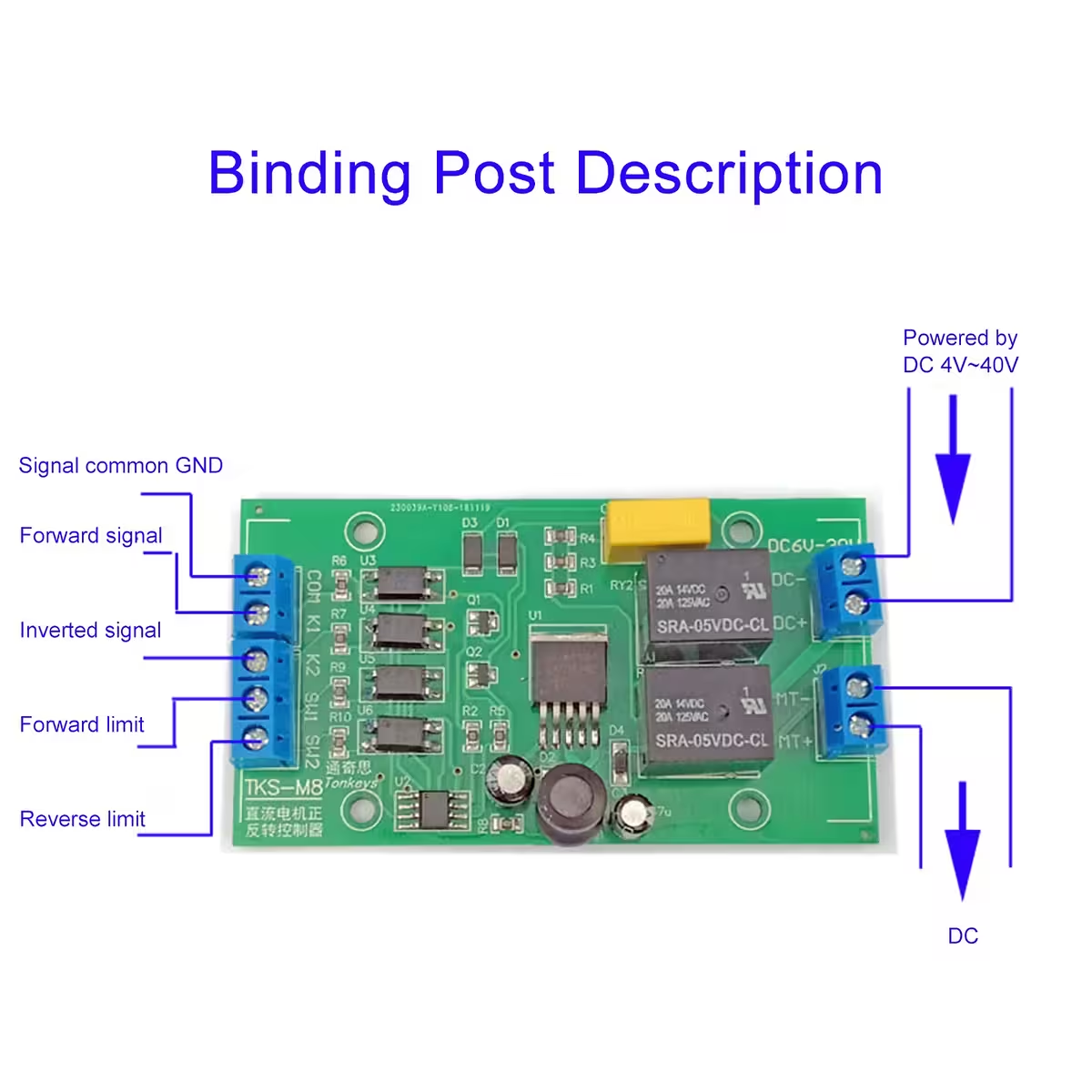
| Вход K1 | Команда за движение напред (active-low) |
| Вход K2 | Команда за движение назад (active-low) |
| SW1 | Краен изключвател за посока напред (препоръчително NO) |
| SW2 | Краен изключвател за посока назад (препоръчително NO) |
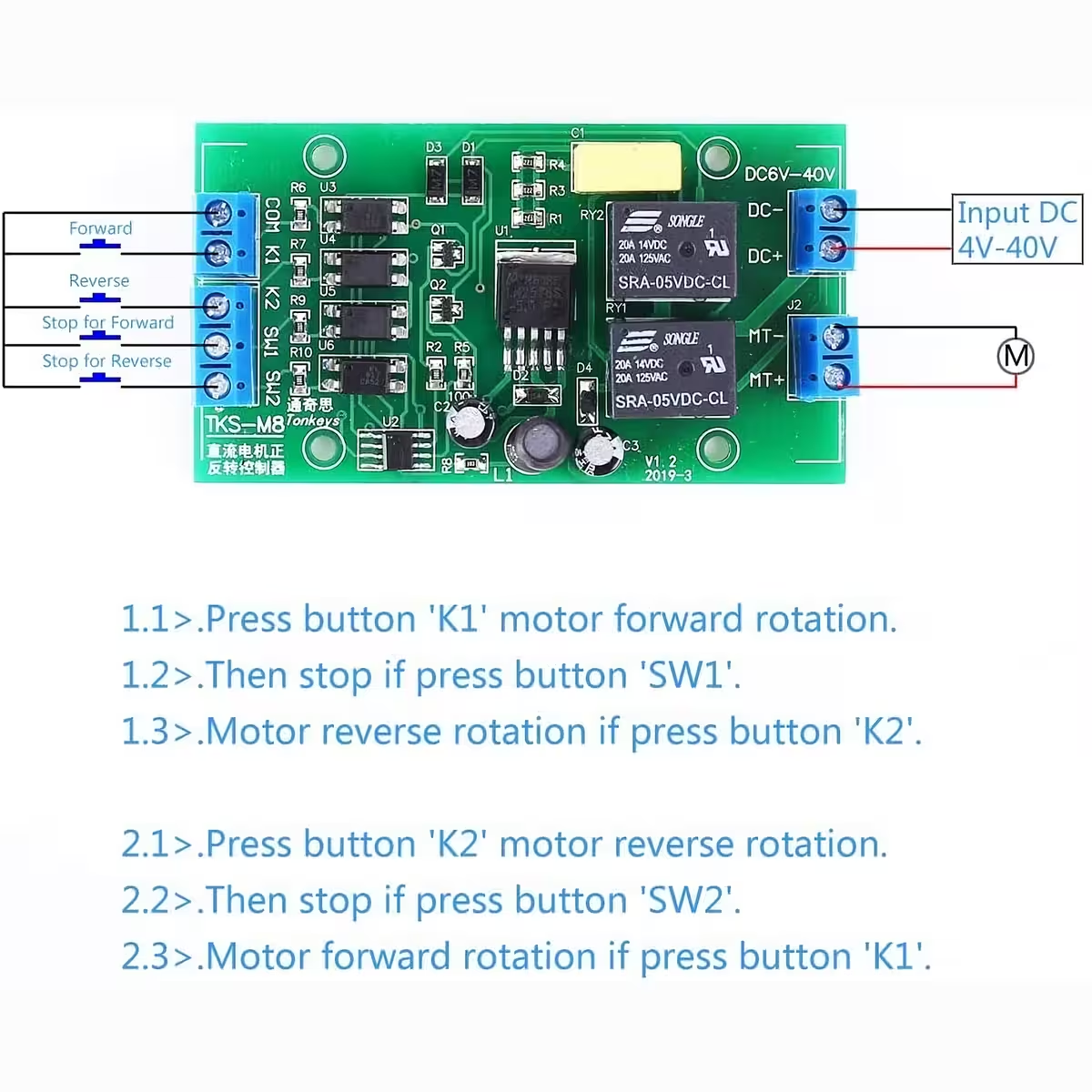
| VIN+ / VIN- | Захранване на модула DC 4–40V |
| Motor+ / Motor- | Изход към DC мотор |
Инструкции за програмиране и употреба
Режим PO (Автоматично задържане): Кратък импулс върху K1 или K2 стартира мотора. Той продължава да работи самостоятелно до активиране на съответния краен изключвател или до подаване на команда за обратната посока. Идеален за автоматизации.
Режим P1 (Jog): Моторът работи само докато командата K1 или K2 остава активна. Идеален за фини настройки и ръчно позициониране.
- Свържете захранването към VIN+ и VIN– (спазвайте поляритета).
- Свържете DC мотора към Motor+ и Motor–.
- Изберете режима на работа: PO за автоматично задържане или P1 за jog.
- Свържете бутоните или управляващите сигнали към K1 (напред) и K2 (назад) — входове active-low.
- Свържете опционално механичните крайни изключватели или NPN-NO сензорите към SW1 и SW2.
- За автоматично циклично движение A→B→A: свържете изходите на NO превключвателите от позиция A към K1 и от позиция B към K2, като оставите SW1/SW2 несвързани.
- За Arduino интеграция: свържете GND на Arduino към GND на контролера, цифровия пин за напред към K1 и цифровия пин за назад към K2. Настройте пиновете като OUTPUT и подайте LOW за активиране.
- Проверете пусковия ток на мотора и осигурете предпазител с подходящ ампераж на захранващата линия.
Съдържание на пакета
- 1 × DC моторен контролер (Forward / Reverse), режими PO/P1
Често задавани въпроси
Какво означава active-low и защо е важно?
Входът се активира, когато напрежението на него падне под 2V — т.е. когато се свърже към маса (GND). Обикновените бутони, NO крайните изключватели и NPN сензорите работят точно така. Не са нужни допълнителни резистори или инвертираща логика.
Каква е разликата между режим PO и режим P1?
В режим PO, кратък импулс стартира мотора и той работи автономно до достигане на краен изключвател или обратна команда. В режим P1, моторът се движи само докато бутонът е натиснат — полезно за прецизно ръчно позициониране.
Мога ли да свържа контролера директно към Arduino?
Да. Свързвате GND на Arduino към GND на контролера и използвате два цифрови пина, настроени като OUTPUT. Когато пинът е LOW, командата е активна. Arduino управлява логиката, а контролерът — мощността.
Мога ли да използвам крайни изключватели с нормално затворен контакт (NC)?
Контролерът е оптимизиран за NO (нормално отворени) изключватели. NC контактите обръщат логиката и могат да доведат до нежелано поведение. Винаги използвайте NO контакти за SW1 и SW2.
Необходим ли е радиатор при максимален ток?
При токове близо до 20A или при интензивни цикли, осигурете добра вентилация и следете температурата на модула. За продължителна работа при голям товар, малък радиатор или принудително охлаждане ще удължат значително живота на устройството.
Как да създам автоматично циклично движение без таймер?
Свържете NO превключвателите от позиция A към K1 и от позиция B към K2, като оставите SW1 и SW2 свободни. При достигане на всеки край, превключвателят автоматично активира командата за обратната посока — моторът ще осцилира непрекъснато без външна намеса.
Видео представяне
Галерия











Отзиви
Все още няма отзиви.